�y�����_ԭ��
���ö������l��׃�����g��y���Ƅ�܇�v���ٶȡ��@헼��g�ǻ��ڶ�����ԭ�����������ģ������_�����l�䵽һ���Ƅӵ����w�ϕr�����������һ���cĿ���ٶȳɱ��������_��̖���Ȳ��ľ�Ȧ��ԓ��̖�M��̎����õ�һ���l�ʵ�׃����ͨ�^DSP��������̖̎�������g̎�����õ�Ŀ���ٶȡ���Փ����܇�v߀���h�x��܇�v�����a���l��׃������ˣ��κη����܇�v�������y�����ٶȡ�
�y�����_ϵ�ЮaƷ������l�_���ҵđ��à�r
����l�_���ҵ� �y���b����^���ơ�ᘌ���ͬ�ĵ^���ݼ��h�������������������Ĝy�ٮaƷ���oՓ�̶��y��߀���ƄӜy�����քӜy��߀���ԄӜy��������һ�����ռ��ȡ������ڸ��ٹ�·�ϣ����й̶����c�M���ٶȱO�y��Ҳ���S��Ѳ߉܇�����ڹ�·�g�M���ƄӜy���������ڌWУ������·�Σ�����������b���ٶ��@ʾ�ƣ��r�r���^��܇�v�M�бO�y���������ѣ��Ķ����C�W���İ�ȫ��
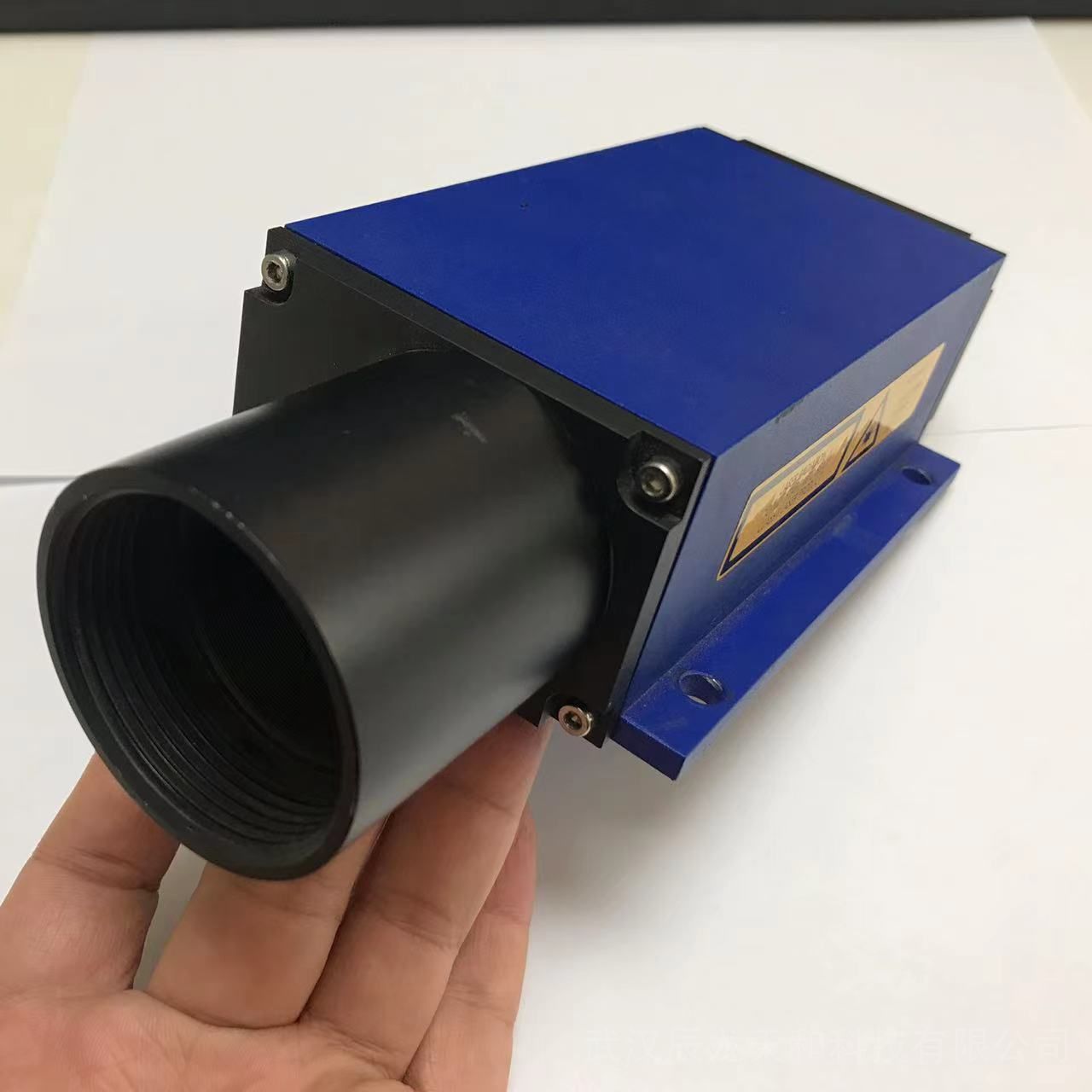
���_�y�كxCS-12�ڜy�������е����M���g
*���ٶȸ�ۙ���g
�����_���ڜy��һ�vĿ��܇�ٶȕr����һ�v�����܇����*���ٶȸ�ۙ���g�ij��F���������߿����^�m��Ŀ��܇�M�и�ۙ�y����ͬ�r���_߀���@ʾ����܇���ٶȡ�
�����쾀ͨӍ���g
�����쾀ͨӍ���g�ij��F������������_���ɔ_��������ͬ�r�����������_�y���Ĝʴ_�ԡ�����˹�¿�DSR�����_������ÿһ���쾀���H���Ѓ�������Ȧ�̓���A/D�D�Q��Ȧ���@�ɂ�����Ȧ��90�ȷ���ͬ�r�ṩ��������̖����Ӌ���Ԫ�ȣ�����ͨ���Ĕ��ֻ���������Ϣ���͵�DSP��Ȧ��ÿ�����ٵ�DSP��Ȧ���DZ㌦ÿһ��ͨ������Ϣ�M�оC�ϵ�“�����~����׃�Q”���ԫ@��ÿһ��Ŀ�˵ķ���
POP���g
POP���g�Įa��ʹ�����_̽�y���Ĺ�Ч��ͣ�ʹ��ʹ�÷����_�b�õij����ߺ��y������_�y�كx�Ăɜy��
ͬ܇�����g
���ڜy���y�}���v����ͬ܇���y���y�c��*�¼��g�ij��F�Ѳ�����Ҫ���������۾���Ӌ���ֹ�ݔ��“�^��”��“�^��”Ŀ���Ա�Ӌ��Ŀ��܇�x�������_�܉��Ԅ��R�eѲ߉܇ǰ��܇�ٿ�������Ŀ��܇�ٶ�Ӌ��������@ʹ��ͬһ܇���IJ������෴܇��ģʽ����ͬ�Ӿ��_�ͺ��Ρ�
����Б����g
���M�ķ���Б����g���S������ȥ�x���ض��Ľ�ͨ�����M�бO�ء���ՓĿ��܇�Dz��Ǿ��x��*��܇�v��Ҳ��Փ����ͬһ܇��߀���෴܇�������_�����Ԅӌ����M���ٶȜy�����@ʾ�����P��Ϣ��
�@Щ���gĿǰ��ʹ����r
Ŀǰ����l�_���ҵĜy���b����^���M����“DSP���g”��90��������ѽ��_ʼ����*��“*���ٶȸ�ۙ���g”��90�����_ʼ���ã�“����Б����g”Ҳ��98���_ʼ�ռ�������*�µ�“ͬ܇���y�����g”Ҳ�ڽ��걻����Ĺ�����ͨ���T������ُ�����҂����Ȅt����������һ���ԵĜy���Ҝy���Y���^�ֲڣ������M���g��ʹ�÷�����Ȼ���ںܴ��ࡣ�����ţ��S���҇���ͨ��·�IJ����Uչ�����ٹ���������b��Ҳ������u���ơ�