- ���g(sh��)����
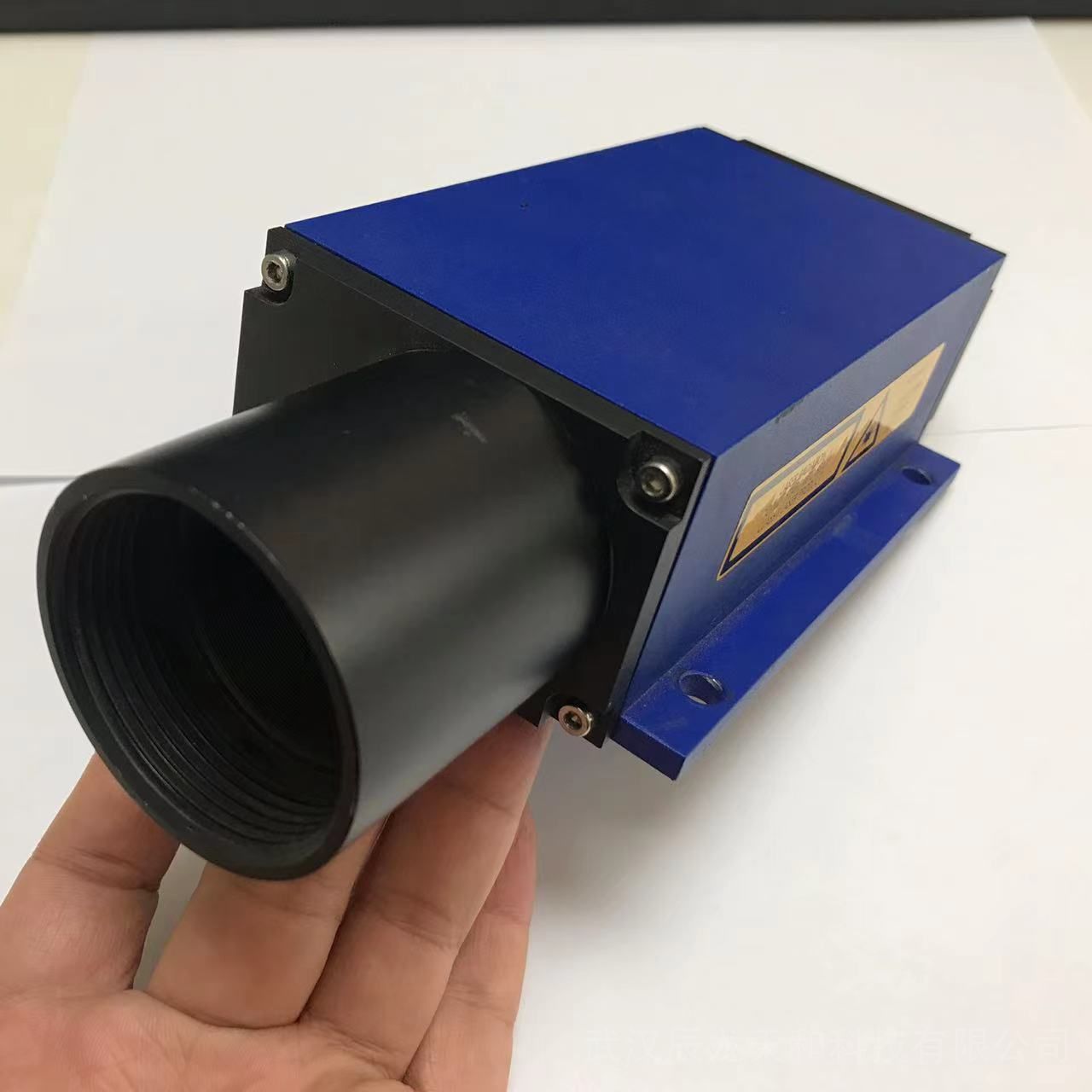
����y(c��)������������ԭ������(y��ng)�ð���
2012-04-24 08:19:35 ��(l��i)Դ����������y(c��)��������ͨ�^(gu��)��ݔ�r(sh��)�g��������������r(sh��)�����ɼ�����O�܌�(du��)��(zh��n)Ŀ��(bi��o)�l(f��)�伤���}�_����(j��ng)Ŀ��(bi��o)������������ɢ�䡣����ɢ��ⷵ�ص�������������������W(xu��)ϵ�y(t��ng)���պ����ѩ����늶��O���ϡ�ѩ����늶��O����һ�N��(n��i)�����зŴ��ܵĹ�W(xu��)��������������ܙz�y(c��)�O�����Ĺ���̖(h��o)��ӛ䛲�̎��Ĺ��}�_�l(f��)�������ر���������(j��ng)�v�ĕr(sh��)�g�����ɜy(c��)��Ŀ��(bi��o)���x����ݔ�r(sh��)�g�����������횘O�侫�_�y(c��)����ݔ�r(sh��)�g����?y��n)����̫�졣���磬���ټs��3´108m/s��Ҫ��ʹ�ֱ����_(d��)��1mm���t��ݔ�r(sh��)�g�y(c��)��������������·����ֱܷ�����O�̵ĕr(sh��)�g��0.001m¸(3´108m/s)=3psҪ�ֱ��3ps�ĕr(sh��)�g���@�nj�(du��)��Ӽ��g(sh��)������^(gu��)��Ҫ��(sh��)�F(xi��n)����(l��i)��r(ji��)̫�ߡ�����������r(ji��)�Ă�ݔ�r(sh��)�g�������������ر��_���@һ�ϵK������һ�N��(ji��n)�εĽy(t��ng)Ӌ(j��)�W(xu��)ԭ������ƽ�����t��(sh��)�F(xi��n)��1mm�ķֱ��ʣ������ܱ��C푑�(y��ng)�ٶȡ�
����y(c��)���������ׂ�(g��)��(y��ng)�Ì�(sh��)��
1���y(c��)�����͎������ӵČ���ʹ�Ãɂ�(g��)�l(f��)ɢ�͂�ݔ�r(sh��)�g������������ڂ��͎��ăɂ�(c��)�挦(du��)�氲�b����?y��n)�ߴ�׃���������䵽���͎��ϵ�λ���Dz��̶��ģ��@�ӣ�ÿ��(g��)���������y(c��)�����Լ��c���ӵľ��x���O(sh��)һ��(g��)���x��L(zh��ng)1����һ��(g��)��L(zh��ng)2������Ϣ�ͽoPLC��PLC���ɂ�(g��)�������g���ľ��x�pȥL1��L2���Ķ���Ӌ(j��)������ӵČ���W��
2�����o(h��)Һ�����͛_ģ�C(j��)е�ְ�һ���A(y��)���͵Ĺܲķ��M(j��n)Һ�����͙C(j��)���²��_ģ�У������߱�횱��Cÿ�ηŵ�λ�Ü�(zh��n)�_�����ϲ��_ģ����֮ǰ��һ��(g��)�l(f��)ɢ�͂������y(c��)�������x�����R��εľ��x���@�ӿɱ��C�_ģ�]��ǰ̎�����_λ�á�
3�����S���ؙC(j��)��λ�Ãɂ�(g��)�����͂������挦(du��)���������b�����������b�ژ�ʽ���ؙC(j��)�ăɂ�(g��)�Ƅ�(d��ng)��Ԫ�ϡ�һ��(g��)��Ԫǰ���\(y��n)��(d��ng)����һ��(g��)�����\(y��n)��(d��ng)����(d��ng)���ؙC(j��)�(q��)��(d��ng)���݁�r(sh��)���ɂ�(g��)�������O(ji��n)�y(c��)���Ե��������ľ��x��ͨ�^(gu��)PLC���B�m(x��)��ۙ���ؙC(j��)�ľ��_λ�á�
�����@�N��ʽ���r(ji��)��ݔ�r(sh��)�g����y(c��)���������������Ի���ɫ��Ŀ��(bi��o)�L(zh��ng)���xλ�Ùz�y(c��)��ʹ�ڙz�y(c��)�Ƕ�׃������r��Ҳ�](m��i)��(w��n)�}��
�����°l(f��)�� -







-
�a(ch��n)Ʒ����
�� ��
- (li��n)ϵ�ˣ�����
- 늡�Ԓ��027-59325428
- �֡��C(j��)��13971408927
- �����棺027-84881397
- �]���䣺287708100@qq.com
- �]������430064
- �ء�ַ������ʡ��h�Нh�(y��ng)�^(q��)�h�(y��ng)���654̖(h��o)�(y��ng)�Ǿ��@1��1��Ԫ301��
- �W(w��ng)��ַ��
https://liaomeng1718.cn.goepe.com/
http://50433.com.cn