�����}�_�y���������ĄӑB����܇�v�z�yϵ�y�OӋ
���W�đ��÷dz��V�������ܽ�֮ͨ�����о�İlչ�������ɞ����W�lչ�����c�I�����c�҇��ć���ֲ��_�ġ���܇����Դ�����Ǯ�ǰ�D׃�����lչ��ʽ�����R��һ��ͻ�����}���挦�@Щ��ͨ�\ݔ�I�������ܺġ���Ⱦ�Լ������}���lչ���ܽ�ͨ�ǽ�Q˼·֮һ������̽ӑ���e���f���˼���y�༼�g�����W���ܽ�ͨ�е�һЩ���ܑ��÷�����Ҫ����������y������������܇��ײϵ�y��܇�����O�ء�܇���讋��܇�v�����`���O�y�Լ�����һЩ���ܱO�y���еđ��õȡ�
�F���x���x�������ܻ�څ��ʹ�ø��N�������đ�������V�������ڼ�������S�����c��ʹ�������@Щ�����аl�ļ���z�y�Ϳ���ϵ�y�������M�ļ��g���ܡ������ʹ�����ܺͺ�����ϵ�y�Y�������������һ�����ɼ���l��������W���������������ɵģ����ܰѱ��y������(����x���������ٶȵ�)�D�Q�ɹ���̖��Ȼ���ù���D�Q���ѹ���̖׃�����̖��ͨ�^�����·���^�V���Ŵ�������õ�ݔ����̖���Ķ�������y���������ڼ��������еă��c(�緽���Ժá����ȸߡ���ɫ�Ժá�����Ժõ�)�����������ͨ�����нY�����οɿ������ɔ_���������ǙCе���|���ֱ��ʸߡ����ȸߡ�ʾֵ�`��С�������Ժá������ڿ��ٜy���ȃ��c��
�����S���Ƽ��IJ���lչ�����Ҍ��γ�������Ҫ��Ҳ������ߣ��oՓ�Ǐ�Ч��߀�Ǿ��ʶȁ��f�����ܻ��ij��ޙz�y���߱،��õ��V���đ��á��b��������r���OӋ�˻��ڼ��������������g�ĸ�Ч�ʸ߾��ȵ�������܇�v�������ߙz�yϵ�y��
����
һ������y���������Ĝy��ԭ��
��������y����һ�N���ӹ�W̽�y���������ӹ�W̽�y��̽�y�C���ǣ���̽�yϵ�y��Ŀ�˰l�䲨��(�ڹ�W̽�y�У�һ���Ǽt����Ҋ��)��������Ŀ�˱��淴��a���ز���̖���ز���̖��ֱ�ӻ��g�ӵذ������y��Ϣ�������c��̖̎��ϵ�yͨ�^���պͷ����ز���̖���@�ñ��y���������������ԏ������ȸߡ������Ժõȃ��c����˼�����F�����̳ɞ��˽^��������ӹ�W̽�yϵ�y�����x��Դ��
����Ŀǰ���}�_����y���ѫ@���ˏV���đ��ã�����Μy��������������x�Ĝy���ȡ��乤��ԭ�����£��˙C�����l���y��ָ��|�l�������l�������}�_��һС���������^����Ƭ�����酢���}�_ֱ���͵��}�_�ɼ�ϵ�y������Ӌ�r����ʼ�c�����Ӕ���ʽ�y��Ӌ�r���_ʼӋ�r����һ�������������R���䣬����Ŀ�ˡ�һ��l��ǰ�������h��Wϵ�y������ǜp�ٳ�������İlɢ�ǣ�����߹������ܶȣ����������x��߀���Ԝp�ٱ������܇���Ŀ����ĸɔ_�����_Ŀ�˵ļ�������һ���ֱ�����������ص��y���x�����������R��W�V���������_̽�y��APD��խ����W�V��������Ҫ�����dz�����ü��⃞���Ć�ɫ�ԣ����ϵ�y������ȣ���̽�y��APD������̖�D�Q�����̖��Ȼ�����̖�M����̖�ŴV�����Ρ����κ�Ļز���̖�P�]�r�g�g��̎��ģ�K��ʹ��ֹͣӋ�r���@�ӣ������r�g�g��̎���ĽY��t����Ӌ������yĿ�˵ľ��xL�飺L=ct��2(1)
����ʽ(1)�У�c����١��V��Ƭ��Ȧ���Ԝp�ٱ������s�W���Ӱ푣�����̽�y��ݔ����̖�еı�����������ʽ(1)���}�_�y�ྫ�ȡ�L�����Ա�ʾ�飺��L=c��t��2 (2)
������ʽ(2)��֪��ϵ�y̎���ĕr�g�g�����ȡ�tֱ�ӛQ�����}�_����y��ϵ�y�Ĝy�ྫ�ȡ�L��
��
������ϵ�y�M�ɼ�����̎��
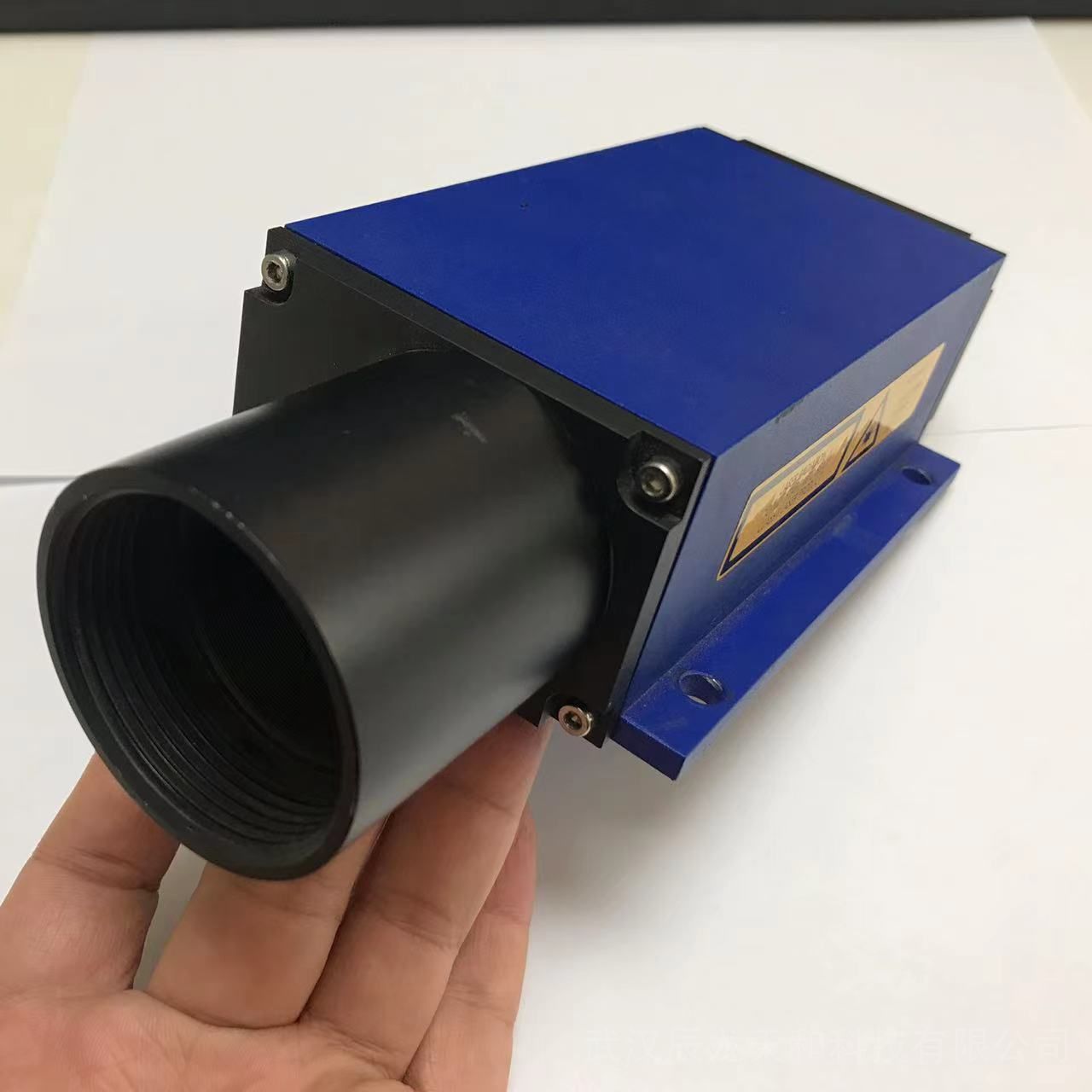
������ϵ�y�Ե�SICK��˾��LMSϵ�Б����ͷǽ��|ʽ����������锵���ɼ��O�䣬�ù��ؙC���锵����̎���O�䡣LMSϵ�Ђ�������һ�N�����ͷǽ��|ʽ�ĸ߾��ȡ��߽������ⲿ���������乤��ԭ���ǻ��ڌ��������w�Еr�g�Ĝy�����䰴�ն��x�õĕr�g�g���l�������}�_��ͨ�^���r��Ӌ��l���}�_�ͽ����}�_֮�g�ĕr�g�g����õ��c���y���w֮�g�ľ��x���}�_���������^�y���������Ȳ���һ�����D�����R�ķ��䌦�܇��h���γ�������衣Ŀ�����w��݆�����������յ���һϵ���}�_���Ё��_����
����LMS�������Ē����l����25Hz��50Hz���Ƕ��l����0.25°��0.5°������Ƕȷ�����0°��270°��*�������x��20m���˜ʜy�����Ȟ�±0��30m����ȫ���o�ȼ���IP67�������۰�ȫ�����ӵĭh�����،��y�������]��Ӱ푣�����������ض�-30��+50��ĭh���С�LMSϵ�м�����������ü����}�_�y��ķ���Ӌ������y���w�Ē���݆�����������c���������ľ��x�����ԘO���˵���ʽ���r��ͨ�^���پW�j�ӿ��ς��o���ؙC�M�к���̎�������ھW�ڵĔ�����ݔ�ٶȿ��_100Mb��s�����Բ������F�����Gʧ���}�����C�܌��r�������،����y�����ς������ؙC�M�Д���̎����
�������ؙCͨ�^��ҕ�������Z��VB�ľW�jͨ�ŃȺ�Winsock�cLMSϵ�Ђ�����ֱ���M�Д����Ľ��Q����ʹ��Winsock�ؼ��r������Ҫ���]ʹ��TCP߀��UDPͨ�Ņf�h��TCPͨ�Ņf�h�ؼ���Ҫ���B�ӵ�ͨ�Ņf�h��������Ԓϵ�y�����_ʼ������ݔǰ��ʹ���߱���Ƚ����B�ӣ�����߀���e�`�z��C�ƣ����┵������ɢ���f�����ݔ���^���^�����e�`�^�١���������DZ��^��Ҫ�ģ�ʹ�ô˷�ʽ���^�á���UDPͨ�Ņf�h��һ�N����Ҫ�B�ӵ�ͨ�Ņf�h�����_Ӌ��C֮�g�Ă�ݔ����ڂ��f�]������Ϣ��һ�_Ӌ��C���͵���һ�_Ӌ��C�����ǃ���֮�g�]�����_���B�ӡ����ں�TCP�ķ�ʽ�������������e�`�z����^���Σ�����ٶȱ��^�죬Ҫ���ٶȕr��ʹ�ô˷�ʽ���^ǡ����
������ϵ�y���ڔ����Č��r��Ҫ����^�ߣ��Ҍ������Ĝʴ_��Ҫ�������^�ͣ����Ԕ������Q֮ǰ������Ҫ�քe��LMSϵ�Ђ��������ؙC��IP��ַ�O�Þ�һ���W�Σ���ʹ��UDPͨ�Ņf�h���M�Д����Ľ��Q�����ؙC���յ�LMSϵ�Ђ������ς��ĘO������Ϣ����ͨ�^����VB�Ⱥ��OӋ�Ĕ���̎���������Д����M��̎��������̎�����^�����¡�
�������ȣ�ͨ�^�������ς��Ĕ����Д�܇�v������c����
����*�����������ς��y�����Ă����������y܇�v�IJ�ͬ�c�ĘO���˵ĘO�돽(ρ1��ρ2��ρ3��……��ρn)�͌����ĘO��(θ1��θ2��θ3��……��θn)��
�����ڶ�����ͨ�^����ϵ��׃�Q�����y�c�ĘO�����D�Q��ƽ��ֱ�����ˣ���(x1=ρ1·cosθ1��y1=ρ1t·sinθ1)(x2=ρ2·cosθ2��y2=ρ2·simθ2)(x3=ρ3·c∞θ3��y3=ρ3·sinθ3)……(xn=ρn·cosθn��yn=ρn·sinθn)��
�������������քe���^y1��y2��y3��……��yn��ȡ*С��yֵymin���ٷքe���^x1��x2��x3��……��xnȡ���赽�ı��y܇�v��*��߅��xֵxmin��*��߅��xֵxmax��Ӌ��δΒ����܇�v��*��߶�Height=H-ymin��*��Width=xmax-xmin(H����������x����ĸ߶�)������δΜy�����õČ����c�߶��M�б��^������������׃���������Д��M܇�c��܇��
����Ȼ��ͨ�^���^���δΜy����܇�v�Č��Ⱥ߶���Ϣ�M����α��^��Ӌ��܇�v��*��߶�Height��*��Width��*���ó����^��܇�v��*�Ⱥ�*��߶ȣ��c����Ҏ����܇�v��������ֵ����^���Ķ��Д��^��܇�v�Ƿ����ߣ����^�ĽY��ͨ�^���ؙC���@ʾ���@ʾ������ͬ�r����y���Y����SQL�����졣���܇�v�������ߵ�Ԓ�����ؙC߀���a������������γ��ˆT�ͳ���܇�v��˾�C���F�˳��ކ��}��
��
���������Y��������
������ϵ�y�еļ�����������b�ڑ��ìF���߶Ȟ�6m�����T���ϣ�����������Ē���y������^��ֱ��܇������܇�v���^�������^��r���z�yϵ�y�Ԅ�Ӌ���ԓ܇�v�Č��Ⱥ߶�ֵ�������@ʾ�ڹ��ؙC���@ʾ���Ϲ������ˆT�O���á�
�����F������^���У��S�C��30�v��ͬ��ʽ��ͨ��܇�v�քe���˹���ʽ���Ԅӷ�ʽ�y��܇�v�Č��Ⱥ߶�(���·քe�Q�錍�Hֵ�͜y��ֵ)���yӋ�����Y��������ϵ�y�ԄӜy���������`����0��10 m�ԃȵ���28�v����0��15 m�ԃȵ���2�v������93����܇�v�z�y�`��С��0��10 m���@�M���Ñ������`��С��0��15 m��Ҫ��
��
���ġ��YՓ
��������LMSϵ�ж��S�����}�_����������Ϳ�ҕ�������Z��VB�ľW�j�Ⱥ��OӋ������܇�v�������ߙz�yϵ�y���y�����ȸߣ����r�Ժã����z܇�v����^�������·�܇�v�Č��Ⱥ߶���Ϣ�������@ʾ�����@ʾ��������ϵ�y�đ��Ì��F��܇�v���ޙz�y�г������ߙz�y���Ԅӻ����������˹��y���`����S�C�ԣ����Ԝy���˹��o��ֱ���քӜy����܇�v���Ⱥ߶ȣ����Ҝy�������Ԅӱ��浽�������п����S�r��ԃ��߀���Դ����߳��ޙz�y�Ĺ���Ч�ʺ͙z�y���ȣ���ˣ���ϵ�y�������õ��ƏVǰ��